Projets académiques BUT GEII
Quelques réalisations de mon parcours GEII S1, S2


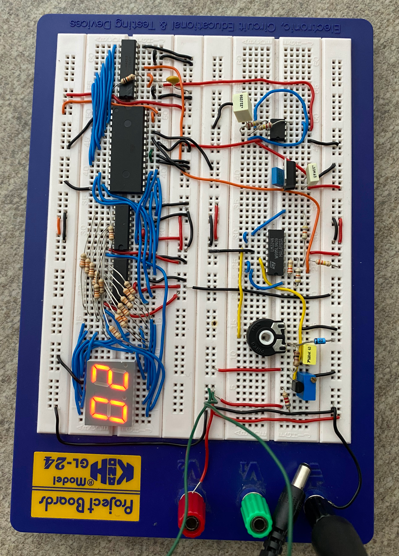
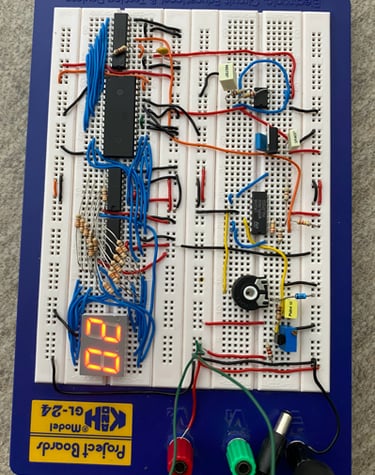
Conception d’un thermomètre d’intérieur avec affichage 7 segments
Objectifs du projet
Mesurer la température ambiante à l’aide d’un capteur
Conditionner le signal (décalage, amplification, adaptation d’impédance)
Préparer le signal pour la conversion numérique et l’affichage
Cahier des charges
Plage de mesure : 0 à 60 °C
Précision d’affichage : 1 °C
Affichage numérique sur afficheurs 7 segments
Signal compatible avec un convertisseur analogique-numérique 0–5 V
Alimentation autonome par pile 9 V
Prise en compte des imperfections de la chaîne analogique
Formation : BUT GEII
Année / semestre : BUT 1 – Semestre 1
Cadre : SAÉ 1.01 (Concevoir) et SAÉ 1.02 (Vérifier)
Durée du projet : environ 10 séances encadrées (≈ 40 h) + travail personnel
Nombre d’étudiants : travail en binôme
Contexte de réalisation
Compétence techniques mises en oeuvre
Mise en œuvre d’un capteur de température (LM335)
Conditionnement du signal analogique (décalage, amplification, adaptation d’impédance)
Utilisation des amplificateurs opérationnels
Lecture de datasheets
Mesures et tests expérimentaux
Travail en équipe
Organisation et gestion du temps
Soft skills
Résultat et Bilan
Le fonctionnement global du système a été validé.
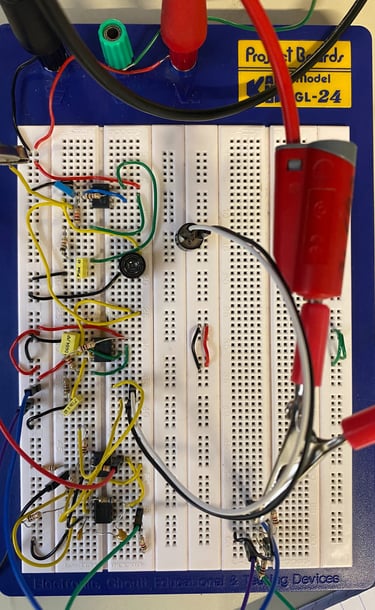
Une difficulté majeure a été rencontrée au niveau de la partie numérique : les afficheurs 7 segments ne s’allumaient pas et les valeurs de sortie du convertisseur analogique-numérique (CAN) n’étaient pas cohérentes avec la tension d’entrée appliquée.
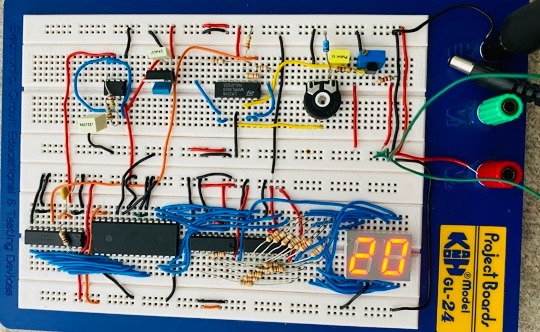
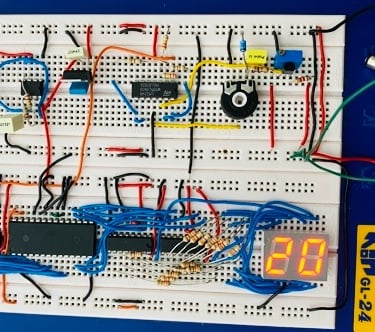
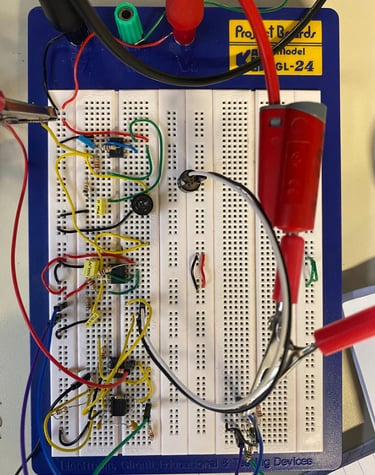
Câblage final sur la plaque
Conception d’un robot autonome
Objectifs du projet
Cahier des charges
Compétence techniques mises en oeuvre
Résultat et Bilan
Concevoir un système de détection d’obstacles par ultrasons
Exploiter les mesures du capteur pour prendre des décisions
Commander les moteurs pour assurer le déplacement du robot
Mettre en place une logique simple de navigation autonome
Le robot doit être totalement autonome
Alimentation par pile 9 V
Capable de détecter et éviter les obstacles
Utilisation d’un capteur à ultrasons pour la détection
Capable de se déplacer et de trouver un chemin de sortie
Fonctionnement fiable sans intervention humaine
Mise en œuvre d’un capteur à ultrasons (mesure de distance)
Gestion de l’alimentation autonome (pile 9 V)
Commande de moteurs
Programmation en C avec Arduino
Analyse fonctionnelle d’un système
Tests et validation expérimentale
Le robot est capable de se déplacer de manière autonome et de détecter les obstacles grâce au capteur à ultrasons. En fonction de la distance mesurée, il adapte sa trajectoire pour éviter les collisions et poursuivre son déplacement.
Le problème de ce robot était son poids et sa longueur
En fonctionnement
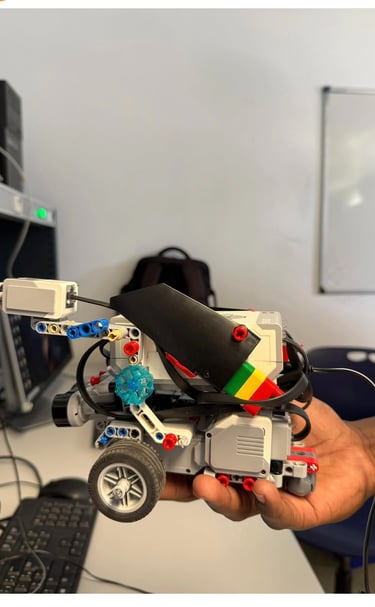
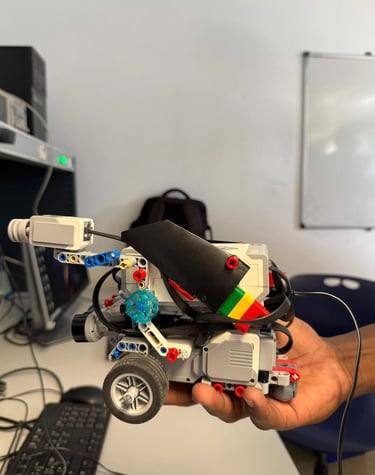
Photo du robot


Robot LEGO
Objectifs du projet
Concevoir un robot LEGO autonome
Réaliser plusieurs missions sans intervention humaine
Exploiter des capteurs (couleur, distance) et des actionneurs
Mettre en œuvre des algorithmes de navigation et de décision
Concevoir un robot LEGO autonome
Réaliser plusieurs missions sans intervention humaine
Exploiter des capteurs (couleur, distance) et des actionneurs
Mettre en œuvre des algorithmes de navigation et de décision
Sortir du labyrinthe de manière autonome
Détecter une ligne rouge
Reculer après détection de la ligne
Tourner à droite
Entrer en contact avec les bords du labyrinthe
Émettre un signal sonore (bip)
Continuer le parcours jusqu’à la sortie
Programmation de robot mobile
Utilisation de capteurs et actionneurs
Logique algorithmique
Autonomie et rigueur technique
Travail en équipe et gestion de projet
Suivre une piste au sol de manière autonome
Détecter un obstacle sur la trajectoire
Éviter l’obstacle sans sortir du parcours
Retrouver et reprendre la piste après l’évitement
Mission 1
Mission 2
Mission 3 et 4
Cahier des charges
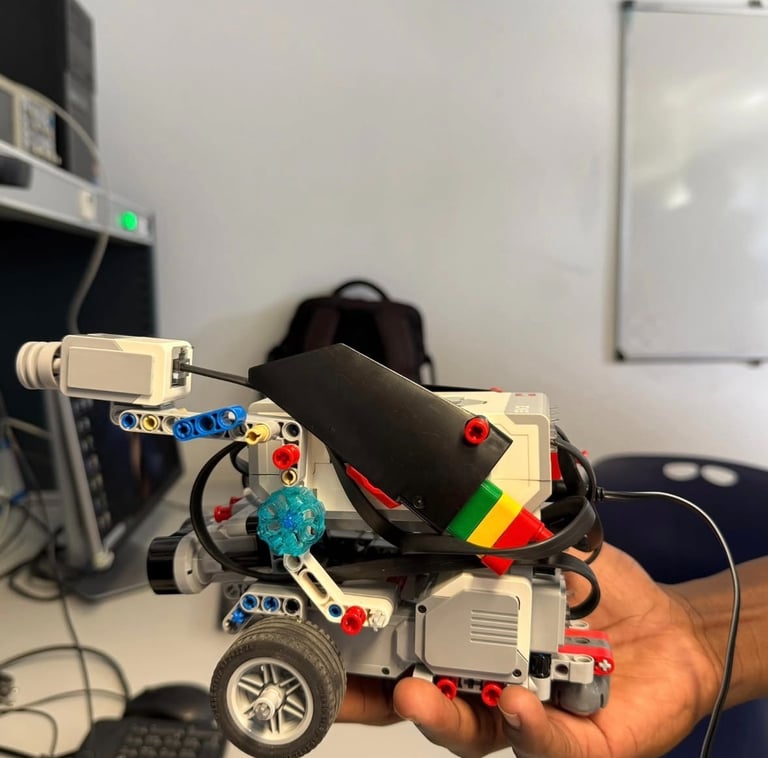
Photo du robot
Compétence techniques mises en oeuvre
Résultat et Bilan
Les missions 1, 2 et 3 ont été réalisées avec succès
Le robot a fonctionné de manière autonome
Le suivi de piste et l’évitement d’obstacles sont validés
La mission 4 n’a pas été réussie
L’échec est dû à des problèmes d’éclairage affectant le capteur de couleur
Le projet a permis de renforcer les compétences en robotique et programmation

En fonctionnement